视频演示 - 相机:相机匹配
相机匹配
此功能用于获取透视图的相机机位,生成相机。以实现实景建模。
操作方法
- 首先确认场景的系统单位是米,再点击“选择图片”导入一张透视图。此时场景内会有左右两组线条。
- 可以看到,默认的匹配角是朝向我们方向的,如图将两组线条分别调整好去匹配这个角就行了。注意:如果要匹配的角是背离我们方向,则先移动一组线条将左右对换,再来进行匹配。
- 线条捕捉好后,将高度调整为一个估计值(单位是米)切换为“预览”模式,测试一下匹配的结果是否满意。如果不满意的话,点击“微调”继续调整线条。
- 效果满意后,点击“完成匹配”即可。
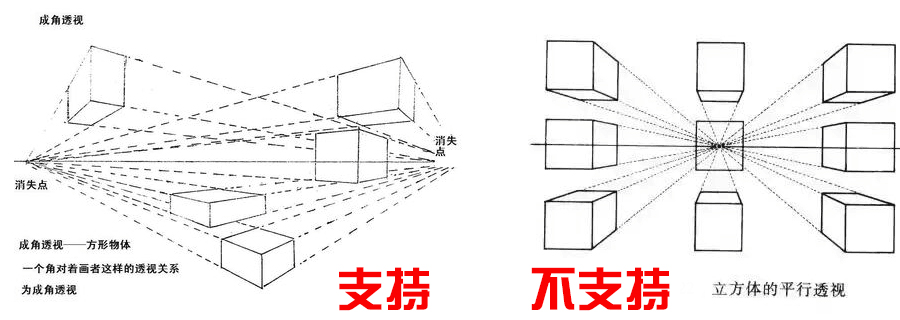
注意:此功能支持成角透视,不主持平行透视.